Содержание:

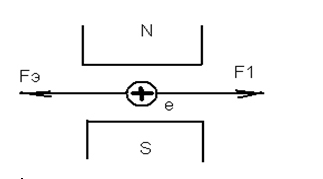
Электрические машины широко применяют на электрических станциях, в промышленности, на транспорте, в авиации, в системах автоматического регулирования и управления, в быту. Электрические машины преобразуют механическую энергию в электрическую и наоборот, электрическую энергию в механическую. Машина, преобразующая механическую энергию в электрическую, называется генератором. Преобразование электрической энергии в механическую осуществляется двигателями.Принцип действия электрических машин основан на использовании законов электромагнитной индукции и электромагнитных сил. Если в магнитном поле полюсов постоянных магнитов или электромагнитов поместить проводник и под действием какой-либо силы F1 перемещать его, то в нем возникает Э.Д.С. равная:
где В — магнитная индукция в месте, где находится проводник,
l — активная длина проводника (та его часть, которая находится в магнитном поле),
v — скорость перемещения проводника в магнитном поле.
Если этот проводник замкнуть на какой-либо приемник энергии, то в замкнутой цепи под действием Э.Д.С. будет протекать ток, совпадающий по направлению с Э.Д.С. в проводнике. В результате взаимодействия тока I в проводнике с магнитным полем полюсов создается электромагнитная сила Fэ, направление которой определяется по правилу левой руки; эта сила будет направлена навстречу силе, перемещающей проводник в магнитном поле. При равенстве сил F1 = Fэ проводник будет перемещаться с постоянной скоростью. Следовательно, в такой простейшей электрической машине механическая энергия, затрачиваемая на перемещение проводника, преобразуется в энергию электрическую, отдаваемую сопротивлению внешнего приемника энергии, т. е. машина работает генератором. Та же простейшая электрическая машина может работать двигателем. Если от постороннего источника электрической энергии через проводник пропустить ток, то в результате взаимодействия тока в проводнике с магнитным полем полюсов создается электромагнитная сила Рэ, под действием которой проводник начнет перемещаться в магнитном поле, преодолевая силу торможения какого-либо механического приемника энергии.
Таким образом, рассмотренная машина так же, как и любая электрическая машина, обратима, т. е. может работать как генератором, так и двигателем. Для увеличения Э.Д.С. и электромеханических сил электрические машины снабжаются обмотками, состоящими из большого числа проводов, которые соединяются между собой так, чтобы Э.Д.С. в них имели одинаковое направление и складывались. Э.Д.С. в проводнике будет индуктирована также и в том случае, когда проводник неподвижен, а перемещается магнитное поле полюсов.
Наиболее распространенные электрические машины. В основном они используются как электродвигатели и являются основными преобразователями электрической энергии в механическую.Асинхронный двигатель имеет статор (неподвижная часть) и ротор (подвижная часть), разделенные воздушным зазором, ротор крепится на подшипниках. Активными частями являются обмотки; все остальные части — конструктивные, обеспечивающие необходимую прочность, жесткость, охлаждение, возможность вращения и т. п. По конструкции ротора асинхронные машины подразделяют на два основных типа: с короткозамкнутым ротором и с фазным ротором. Оба типа имеют одинаковую конструкцию статора и отличаются лишь исполнением обмотки ротора. Магнитопровод ротора выполняется аналогично магнитопроводу статора — из электротехнической стали и шихтованным. Фазный ротор используют когда необходимо создать большой пусковой момент. К ротору подводят ток и в результате уже возникает магнитный поток необходимый для создания момента.
На обмотку статора подается напряжение, под действием которого по этим обмоткам протекает ток и создает вращающееся магнитное поле. Магнитное поле воздействует на стержни ротора и по закону магнитной индукции возникает электрический ток т. к. изменяется магнитный поток, проходящий через замкнутый контур ротора. Токи в стержнях ротора создают собственное магнитное поле стержней, которые вступают во взаимодействие с вращающимся магнитным полем статора. В результате на каждый стержень действует сила, которая складываясь по окружности создает вращающийся электромагнитный момент ротора из-за того, что индукционный ток, возникающий в замкнутом контуре ротора, имеет такое направление, что создаваемое им магнитное поле противодействует тому изменению магнитного потока, которым был вызван данный ток. Следовательно и возникает вращение.Частота вращения ротора не может достигнуть частоты вращения магнитного поля, так как в этом случае угловая скорость вращения магнитного поля относительно обмотки ротора станет равной нулю, магнитное поле перестанет индуцировать в обмотке ротора Э.Д.С. и, в свою очередь, создавать крутящий момент.
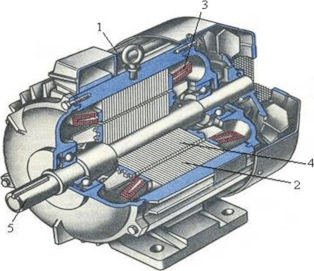
На рисунке приведен вид асинхронной машины с короткозамкнутым ротором в разрезе:
1 — станина,
2 — сердечник статора,
3 — обмотка статора,
4 — сердечник ротора с короткозамкнутой обмоткой,
5 — вал.
Синхронный двигатель не имеет принципиальных конструктивных отличий от асинхронных. На статоре синхронного двигателя помещается трехфазная обмотка, при включении которой в сеть трехфазного переменного тока будет создано вращающееся магнитное поле, число оборотов в минуту которого n = 60f/p, где f — частота напряжения питания привода. На роторе двигателя помещена обмотка возбуждения, включаемая в сеть источника постоянного тока. Либо ротор выполнен из постоянного магнита. Ток возбуждения создает магнитный поток полюсов или в случае с постоянным магнитом, магнитный поток уже создан. Вращающееся магнитное поле, полученное токами обмотки статора, увлекает за собой полюса ротора. При этом ротор может вращаться только с синхронной скоростью, т. е. со скоростью, равной скорости вращения поля статора. Таким образом, скорость синхронного двигателя строго постоянна, если неизменна частота тока питающей сети.
Достоинством синхронных двигателей является меньшая, чем у асинхронных, чувствительность к изменению напряжения питающей сети. У синхронных двигателей вращающий момент пропорционален напряжению сети в первой степени, тогда как у асинхронных — квадрату напряжения. Вращающий момент синхронного двигателя создается в результате взаимодействия магнитного поля статора с магнитным полем полюсов. От напряжения питающей сети зависит только магнитный поток поля статора.
Шаговые двигатели — это электромеханические устройства, преобразующие сигнал управления в угловое (или линейное) перемещение ротора с фиксацией его в заданном положении без устройств обратной связи. По сути шаговый двигатель является синхронным, но отличается подходом управления. Рассмотрим самые распространенные.
Двигатели с постоянными магнитами состоят из статора, который имеет обмотки, и ротора, содержащего постоянные магниты. Чередующиеся полюса ротора имеют прямолинейную форму и расположены параллельно оси двигателя. Благодаря намагниченности ротора в таких двигателях обеспечивается больший магнитный поток и, как следствие, больший момент, чем у двигателей с переменным магнитным сопротивлением. Такой двигатель имеет величину шага 30°. При включении тока в одной из катушек, ротор стремится занять такое положение, когда разноименные полюса ротора и статора находятся друг напротив друга. Для осуществления непрерывного вращения нужно включать фазы попеременно. На практике двигатели с постоянными магнитами обычно имеют 48—24 шага на оборот (угол шага 7,5—15°). Двигатели с постоянными магнитами подвержены влиянию обратной Э.Д.С. со стороны ротора, котрая ограничивает максимальную скорость.
Являются более дорогими, чем двигатели с постоянными магнитами, зато они обеспечивают меньшую величину шага, больший момент и большую скорость. Типичное число шагов на оборот для гибридных двигателей составляет от 100 до 400 (угол шага 3,6…0,9°). Ротор гибридного двигателя имеет зубцы, расположенные в осевом направлении. Ротор разделен на две части, между которыми расположен цилиндрический постоянным магнит. Таким образом, зубцы верхней половинки ротора являются северными полюсами, а зубцы нижней половинки — южными. Кроме того, верхняя и нижняя половинки ротора повернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок. Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи. Статор гибридного двигателя также имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки. Обычно используются 4 основных полюса для 3,6° двигателей и 8 основных полюсов для 1,8…0,9° двигателей. Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора, что улучшает статический и динамический момент. Это обеспечивается соответствующим расположением зубцов, когда часть зубцов ротора находится строго напротив зубцов статора, а часть между ними. Зависимость между числом полюсов ротора, числом эквивалентных полюсов статора и числом фаз определяет угол шага S двигателя:
где Nph — число эквивалентных полюсов на фазу, равное числу полюсов ротора,
Ph — число фаз,
N — полное количество полюсов для всех фаз вместе.
Сервопривод — общее название привода, синхронного, асинхронного либо любого другого, с отрицательной обратной связью по положению, моменту и др. параметрам, позволяющего точно управлять параметрами движения. Сервопривод – это комплекс технических средств. Состав сервопривода: привод – например, электромотор, датчик обратной связи – например, датчик угла поворота выходного вала редуктора (энкодер), блок питания и управления (он же преобразователь частоты \ сервоусилитель \ инвертор \ servodrive). Мощность двигателей: 0,05…15 кВт. Существует понятие «вентильный двигатель». Это всего лишь названия для двигателя, управление которым осуществляется через «вентили» – ключи, переключатели и т. п. коммутационные элементы. Современными «вентилями» являются IGBT-транзисторы использующиеся в блоках управления приводами. Никакого конструктивного отличия нет. Основным достоинством сервоприводов является наличие обратной связи, благодаря которой такая система может поддерживать точность позиционирования на высоких скоростях и высоких моментах. Также систему отличает низкоинерционность и высокие динамические характеристики, например время переключения от скорости –3 000 об/мин до достижения 3 000 об/мин составляет всего 0,1 с. Современные блоки управления являются высокотехнологическими изделиями со сложной системой управления и могут обеспечить выполнение практически любой задачи.
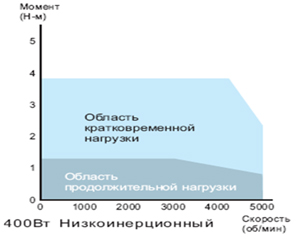
Характеристики системы сервопривода рассмотрим основываясь на сервоприводах фирмы Delta elc. Серии блока управления ASDA-A и двигателем 400 Вт. Как видно поддержание момента линейное на всем диапазоне скоростей. Это достигается благодаря использованию синхронного двигателя в высококачественном исполнении. Величина шага перемещения определяется разрешающей способностью датчика обратной связи, энкодера, а так же блоком управления. Стандартные сервоприводы могут обеспечить шаг в 0,036° т. е. 1/10 000 от оборота, и это на скоростях до 5 000 об/мин.
Самые современные сервоприводы отрабатывают шаг в 1/2 500 000.
| Шаговый двигатель | Серводвигатель |
|---|---|
| Надежность | |
| Шаговые двигатели обладают высокой надежностью, так как в их конструкции отсутствуют изнашивающиеся детали. Рабочий ресурс двигателя зависит только от ресурса примененных в нем подшипников. | Большинство современных бесколлекторных сервоприводов от известных производителей (Mitsubishi, Siemens, Omron, Delta) отличаются высокой надежностью, порой сравнимой с надежностью шаговых двигателей, даже несмотря на значительно более сложное устройство сервопривода. |
| Эффект потери шагов | |
| Всем шаговым двигателям присуще свойство потери шагов. Данный эффект проявляется в некотором неконтролируемом смещении траектории перемещения инструмента, от необходимой траектории. При изготовлении простых деталей, имеющих малую длину траектории перемещения инструмента и при невысоких требованиях к изделию, в большинстве случаем данным эффектом можно пренебречь. Но при обработке сложных изделий (пресс-формы, резьба и т. п.), где длина траектории может достигать километров!, данный эффект в большинстве случаев будет приводить к неисправимому браку. Данный эффект проявляется при выходе за допустимые характеристики двигателя, при неправильном управлении двигателем, а также при «проблемах» с механикой. Применение современных технологий управления шаговыми двигателями, с применением современной электроники, позволяет полностью устранить данный эффект, но стоимость возрастает. | Эффект потери шагов у сервоприводов полностью отсутствует. Потому, что в каждом сервоприводе имеется датчик положения (энкодер), который постоянно отслеживает положение ротора двигателя и при необходимости выдает команды коррекции положения, на основании которых управляющая электроника, проанализировав данные, полученные с энкодера, вырабатывает необходимые сигналы управления на двигатель. Данный механизм называется обратной связью. |
| Скорость перемещения | |
| При использовании шаговых двигателей в приводах подач в станках с ЧПУ можно добиться скорости 150…300 мм/сек (бывает и больше, но это уже «экзотика»). При максимальных скоростях и при превышении допустимой нагрузки возможно проявление эффекта потери шагов. | Приводы подач станков с ЧПУ на основе серводвигателей позволяют достигать высоких скоростей. Скорость холостого перемещения 0,5…1 м/c является нормальным явлением для сервоприводов. |
| Динамическая точность* | |
| Динамическая точность является определяющей характеристикой при обработке сложноконтурных изделий (пресс-формы, резьба и т. п.). Шаговые двигатели отличаются высокой динамической точностью, которая является следствием принципов работы шагового двигателя. Обычно, на хорошей механике, рассогласование не превышает 20 мкм (1 мкм = 0,001 мм). | Высококачественные сервоприводы имеют высокую динамическую точность до 1…2 мкм и выше! (1 мкм = 0,001 мм). Для получения высокой динамической точности необходимо применять сервоприводы, предназначенные для контурного управления, которые точно отрабатывают заданную траекторию. |
| Стоимость | |
| В шаговых двигателях применяются дорогостоящие редкоземельные магниты, а также ротор и статор изготавливаются с прецизионной точностью, и поэтому по сравнению с общепромышленными электродвигателями шаговые двигатели имеют более высокую стоимость. | Применение дорогостоящего датчика положения ротора, а также применение достаточно сложного блока управления обуславливает значительно более высокую стоимость, чем у шагового двигателя. |
| Стоимость систем для создания момента в 2 Нм | |
| Гибридный шаговый двигатель с шагом 1,8° – 12 000 р. Блок управления – 9 600 р. |
Привод с энкодером обеспечивающий шаг в 0,036°, максимальную скорость 3 000 об/мин — 12 704 р. Блок управления – 13 000 р. |
| Ремонтопригодность | |
| шагового двигателя может выйти из строя только обмотка статора, а ее замену может произвести только производитель двигателя, так как если двигатель даже только разобрать и снова собрать, он уже не будет работать! Потому, что при разборке двигателя происходит разрыв магнитных цепей внутри двигателя и происходит размагничивание магнитов. Поэтому после сборки двигателя требуется намагничивание внутренних магнитов на специальной установке. | Поврежденный серводвигатель в большинстве случаев проще заменить, чем ремонтировать. Ремонту в основном подвергают только мощные двигатели, имеющие весьма высокую стоимость. |
| Столкновение с препятствием | |
| Столкновение подвижных узлов станка с препятствием, в результате которого происходит остановка шагового двигателя, не взывает у него каких-либо повреждений. | В станке на базе сервоприводов, при столкновении подвижных узлов с препятствием, управляющая электроника определяет, что произошло повышение нагрузки и для компенсации повышенной нагрузки повышает уровень тока, подаваемый на двигатель. При полной принудительной остановке на серводвигатель подается максимальный ток. Поэтому, если управляющая электроника не отслеживает подобную ситуацию, то возможно сгорание двигателя. |
| Преимущества | |
|
|
| Недостатки | |
|
|
* - Динамическая точность — максимальное отклонение реальной траектории перемещения инструмента от запрограммированной
Сервопривод и шаговый двигатель не являются конкурентами, а каждый занимает свою определенную нишу. Сравним их на основе рынка станков с ЧПУ. Применение шаговых двигателей полностью оправданно для применения в недорогих станках с ЧПУ (в ценовой категории до 10—12 тыс. USD), предназначенных для обработки дерева, пластиков, ДСП, МДФ, легких металлов и других материалов средней скорости.Применение высококачественных сервоприводов необходимо в высокопроизводительном оборудовании, где главным критерием является производительность. Единственный «недостаток» хорошего сервопривода – это его высокая стоимость. К примеру, станок ATS-760 на шаговых приводах стоит 11 000 $, а эта же модель, но на сервоприводах стоит 17 500 $. Однако возможности получения высокостабильного или точного управления, широкий диапазон регулирования скорости, высокая помехоустойчивость, малые габариты и вес часто являются решающими факторами их применения. Добившись одинаковых качеств от сервопривода и шагового их стоимости станут соизмеримыми при однозначном лидерстве сервопривода.
При добавлении товара возникла ошибка. Пожалуйста, повторите попытку чуть позже.