Применение программируемых логических контроллеров (ПЛК) совместно с преобразователями частоты (ПЧ) в современных системах автоматизации позволяет решать наиболее сложные задачи по управлению электродвигателем. Реализовать управление частотным преобразователем с контроллера возможно несколькими способами, один из которых - управление по цифровому интерфейсу RS-485. В данной статье будет рассмотрено подключение преобразователя частоты ELHART EMD-MINI к программируемому логическому контролеру Delta DVP14SS211R, настройка связи по интерфейсу RS-485 и протоколу Modbus RTU, приведен пример управляющей программы для контроллера, реализующую обмен данными и управление преобразователем частоты.
1. Техника безопасности
ВНИМАНИЕ! К работам по монтажу, наладке, ремонту и обслуживанию технологического оборудования допускаются лица, имеющие техническое образование и специальную подготовку (обучение и проверку знаний) по безопасному производству работ в электроустановках с группой не ниже 2 для ремонтного персонала, а также имеющие опыт работ по обслуживанию оборудования, в конструкцию которого вносятся изменения и дополнения, либо производится модернизация. За неисправность оборудования и безопасность работников при неквалифицированном монтаже и обслуживании ООО «КИП‑Сервис» ответственности не несет.
2. Подключение ПЧ и ПЛК
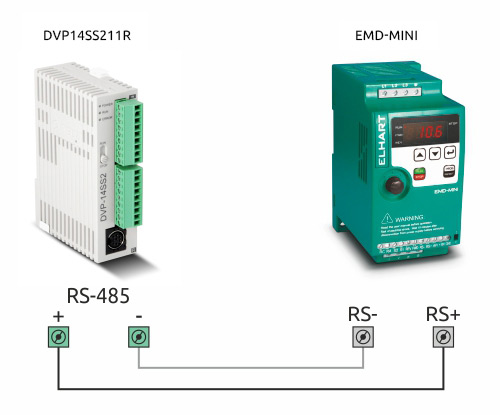
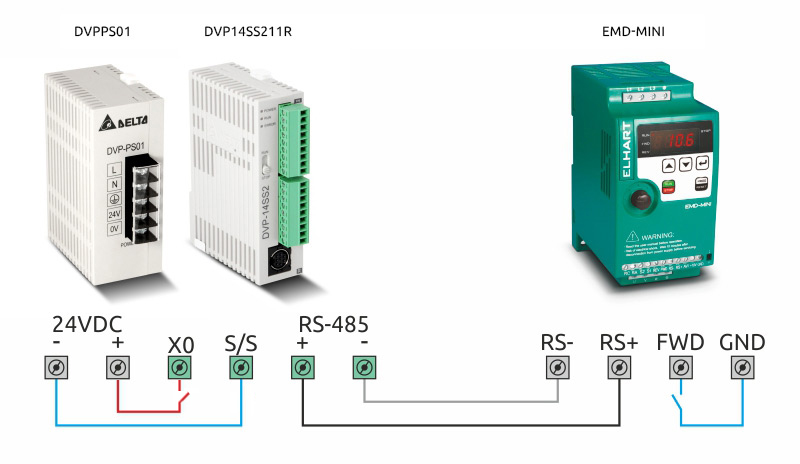
В данном примере для подключения преобразователя частоты к промышленному программируемому контроллеру используется порт COM2. Необходимо соединить клемму «+» порта контроллера с клеммой «RS+» преобразователя частоты и клемму «-» с клеммой «RS-» соответственно. Схема подключения изображена на рисунке 1.
Рисунок 1 - Подключение преобразователя частоты и контроллера по RS-485
3. Настройка сетевых параметров ПЧ EMD-MINI
В преобразователе частоты необходимо установить параметры согласно таблице 1.
Таблица 1 - Настройка параметров EMD-MINI
Параметр
Значение
Описание
P101
5
Источник задания выходной частоты - интерфейс RS-485
P102
2
Источник команд управления - интерфейс RS-485
P700
1
Скорость передачи данных - 9600 бод
P701
3
Формат данных - 8,N,1, протокол Modbus RTU
P702
1
Адрес преобразователя частоты - 1
4. Адресация регистров ПЧ EMD-MINI
В данном примере будет рассмотрено чтение регистров состояния привода, текущей выходной частоты, состояния дискретных входов и дискретного выхода, запись команды управления приводом и задание выходной частоты. Адреса и описание регистров представлены в таблице 2.
Таблица 2 - Адреса регистров EMD-MINI
Параметр
Описание
Функция
Адрес
Управление приводом
bit1-bit0
00B: нет действия 01B: Стоп 10B: Пуск 11B: работа на частоте JOG
запись
2000h
bit3-bit2
00B: нет действия 01B: вращение в обратном направлении 10B: вращение в прямом направлении 11B: сменить направление вращения
bit4
0B: нет действия 1B: сброс аварии
Задание выходной частоты
диапазон 0...9999 (0...999,9 Гц)
Чтение/Запись
2001h
Мониторинг состояния
bit0
0В: прямое направление вращения 1В: обратное направление вращения
Если необходимо использовать другие регистры, их адреса можно узнать по номеру параметра, указанного в руководстве по эксплуатации. Номер параметра соответствует адресу регистра в шестнадцатеричном формате, например:
параметр P003 (выходной ток) - 0003h;
параметр P107 (время ускорения) - 006Bh;
параметр P108 (время замедления) — 006Сh.
Например, чтобы подать преобразователю частоты команду на пуск электродвигателя в прямом направлении, необходимо в регистр 2000h записать значение 1010b или число 10 в десятичном формате, а для запуска в обратном направлении - число 0110b или 6 в десятичном формате. Частота задается в регистре 2001h. Для того чтобы установить частоту вращения 30 Гц, в регистр необходимо записать число 300 в десятичном формате.
В данном примере будет описан процесс создания управляющей программы для ПЛК в среде WPLSoft на языке лестничных диаграмм (LD).
5.1. Конфигурация порта COM2
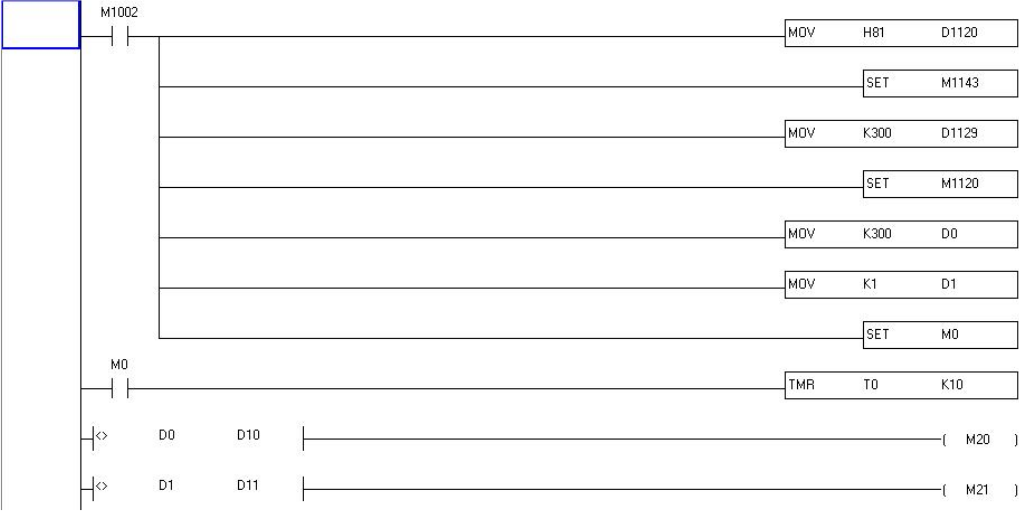
В первую очередь необходимо произвести настройку порта COM2 контроллера. Пример программы для настройки порта представлен на рисунке 2.
Рисунок 2 - Задание настроек порта COM2
М1002 включается один раз при включении контроллера.
D1120 - конфигурация порта COM2. В преобразователе частоты EMD-MINI были установлены следующие настройки связи: скорость 9600 бод, 8 бит данных, контроль четности отсутствует, 1 стоповый бит. Такие же настройки
необходимо установить для порта COM2 контроллера. Значения битов для регистра D1120 представлены в таблице 3.
В таблице 4 показано, как формируется значение для регистра D1120 с использованием данных из таблицы 3.
Таблица 4 - Значение для регистра D1120
Биты 15 - 8
Скорость 9600
1 стоп-бит
Биты четности-нет
8 бит данных
В данном примере не используются
1000
0
00
1
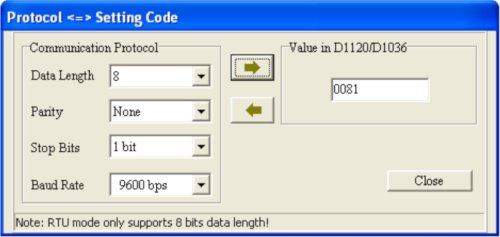
В результате в регистр D1120 необходимо записать число 10000001b, предварительно переведя его в шестнадцатеричный формат - 81h. Также можно воспользоваться встроенным в WPLSoft калькулятором в разделе
Help>Auxiliary Editing>Protocol⇔Setting Code (рисунок 3).
Рисунок 3 - Вычисление значения для записи в регистр D1120
В полях слева необходимо выбрать конфигурацию протокола и нажать на стрелку вправо. В поле справа будет число в шестнадцатеричном формате, которое нужно записать в D1120.
М1143 - реле выбора режима ASCII/RTU. Если оно включено, то используется режим RTU, если выключено - режим ASCII.
D1129 - настройка времени ожидания ответа в миллисекундах. Если время ожидания ответа будет превышено, включится специальное реле М1129. В данном примере время ожидания составляет 300 миллисекунд.
М1120 - сохранение параметров связи для порта COM2.
5.2. Инициализация и создание очереди запросов
После настройки коммуникационного порта ПЛК необходимо добавить в программу инициализации два регистра и записать в них значения, как это показано на рисунке 4.
Рисунок 4 - Инициализация и начальная запись в регистры D0 и D1
В регистре D0 будет находится значение установленной частоты, в регистре D1 - команды управления приводом. В данном примере после запуска контроллера в преобразователь частоты будет отправляться задание частоты 30
Гц и команда «Стоп». Так как преобразователи частоты включаются медленнее чем промышленные контроллеры, то необходимо выждать некоторое время перед началом процедуры обмена по интерфейсу RS-485. В данном примере эту задержку реализует таймер T0 и задержка составляет 1 секунду.
Инструкции "LD<>" и внутренние реле М20 и М21 будут необходимы для отправки запроса на запись при изменении содержимого регистров D0 и D1.
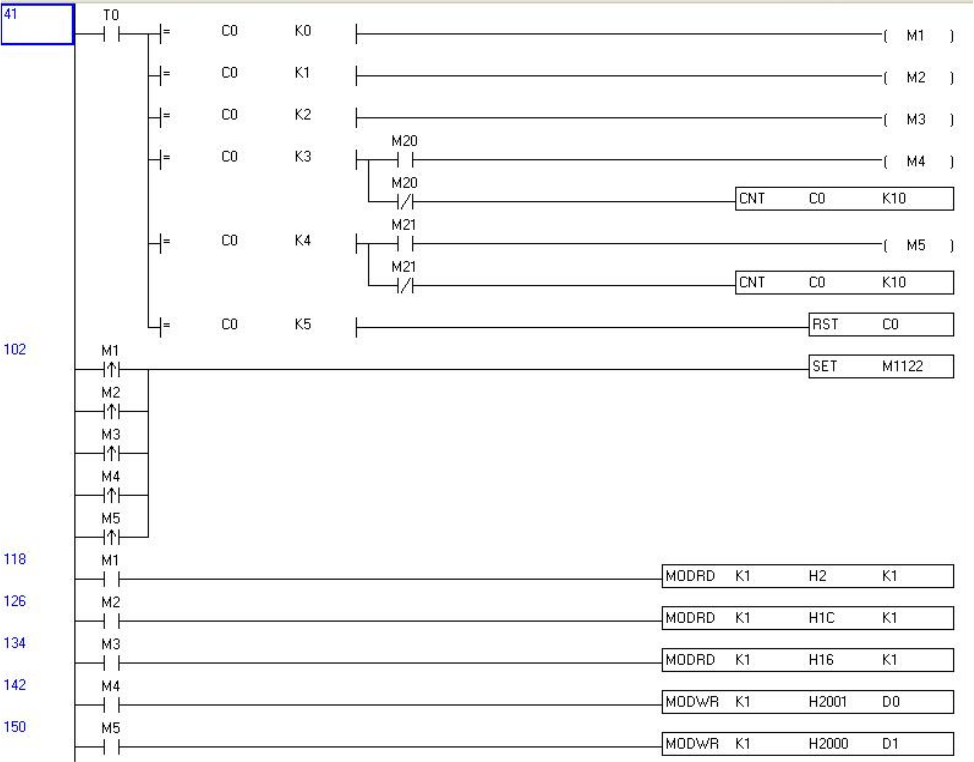
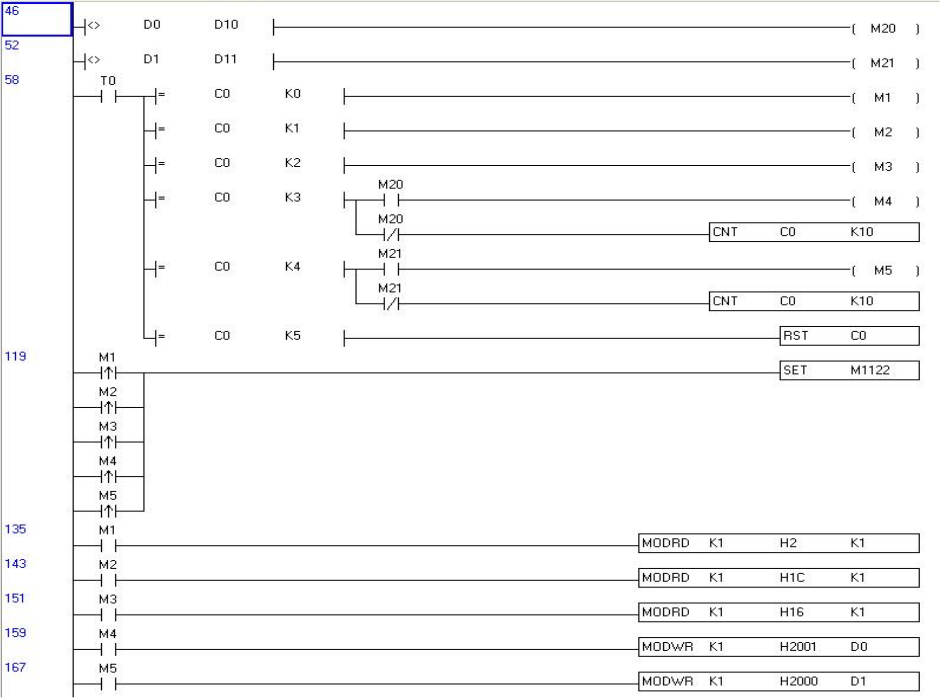
Преобразователь частоты EMD-MINI поддерживает чтение Modbus-командой 03 и запись командой 06, поэтому для обмена данными удобно использовать инструкции MODRD для чтения и MODWR для записи. Так как в программе будет применяться несколько инструкций обмена данными, необходимо разделить их выполнение по времени так, чтобы в каждый момент выполнялась только одна из инструкций. Пример возможной реализации очередности запросов приведен на рисунке 5.
Рисунок 5 - Организация поочередного исполнения инструкций чтения/записи
По истечении времени задержки включается выход таймера Т0 и происходит сравнение значения счетчика С0 с константой. При совпадении включается одно из внутренних реле M1 - M5, которые служат условием выполнения инструкций MODRD и MODWR. Для начала обмена данными необходимо включить специальное реле M1122, после чего будет выполнена одна из инструкций чтения или записи.
5.3. Чтение регистров и преобразование данных
Первыми по порядку будут исполняться инструкции MODRD - чтение регистров. При значении счетчика С0=0 выполнится первая инструкция MODRD. В этой инструкции необходимо указать следующие параметры:
MODRD
Адрес устройства
Адрес регистра
Длина данных
Адрес устройства – 1 (значение К1); Адрес регистра – 2 (значение Н2), текущая выходная частота; Длина данных – 1 (значение К1), количество считываемых регистров.
Далее находятся еще две инструкции чтения – регистра состояния ПЧ (H1C) и регистра состояния дискретных входов и дискретного выхода (H16).
При работе инструкции MODRD считанные данные сохраняются в регистры D1070-D1076, как показано в таблице 5.
Таблица 5 - Расположение принятых данных
Регистр
Данные
D1070 младший байт
Адрес устройства
D1071 младший байт
Код функции чтения
D1072 младший байт
Количество данных (байт)
D1073 младший байт
Содержимое регистра
D1074 младший байт
Содержимое регистра
D1075 младший байт
CRC
D1076 младший байт
CRC
Как видно из таблицы, данные записываются в младшие байты регистров D1070-D1076 и для дальнейшего использования данные необходимо преобразовать и поместить в один регистр. Пример реализации преобразования
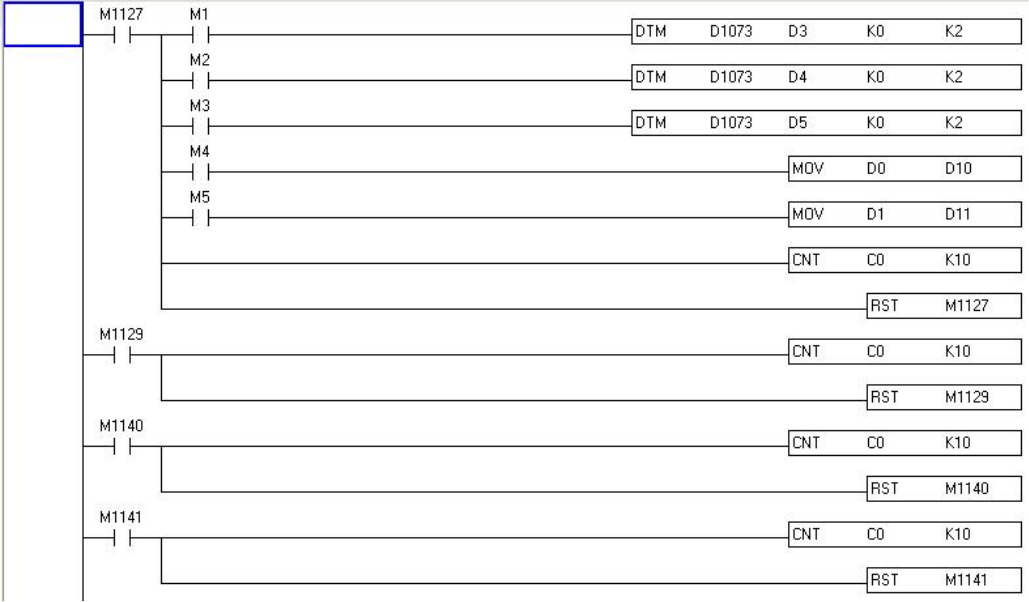
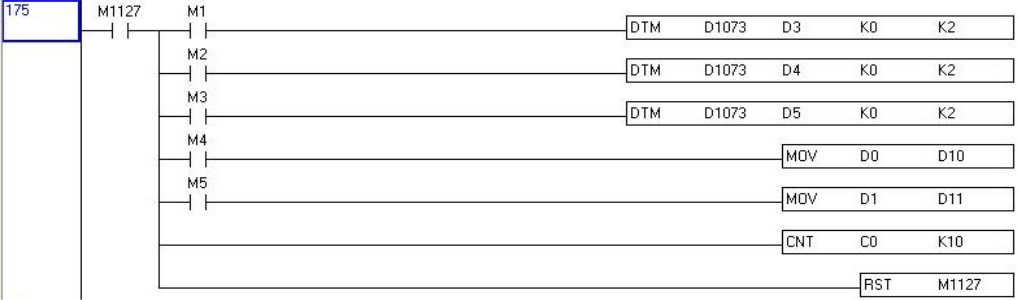
приведен на рисунке 6.
Рисунок 6 - Преобразование данных
При срабатывании специального реле М1127 (завершение приема данных) происходит преобразование с помощью инструкции DTM. Младшие байты из регистров D1073 и D1074 объединяются и значение пересылается в регистр D3. Те же преобразования будут сделаны и для следующих двух инструкций чтения, после чего преобразованные данные будут помещены в регистры D4 и D5 соответственно.
При срабатывании специального реле М1127 или флагов ошибок приема или передачи (М1129, М1140 и М1141) происходит увеличение значения счетчика C0 и переход к следующей инструкции чтения или записи.
5.4. Запись регистров
Пример записи регистров приведен на рисунке 7. Если значение регистров D0 или D1 изменяются, то срабатывают реле М20 или М21 и происходит исполнение соответствующей инструкции MODWR.
Рисунок 7 - Запись регистров при изменении значения D0 или D1
Порядок записи параметров инструкции MODWR:
MODWR
Адрес устройства
Адрес регистра
Данные для записи
Адрес преобразователя частоты - 1 (значение К1); Адрес регистра - 2001 (значение Н2001), регистр, в который будет производиться запись; Источник данных для записи - регистр D0.
Данные из регистра D0 записываются в регистр H2001, из D1 - в регистр Н2000. После успешной записи данные из регистра D0 копируются в регистр D10, а из регистра D1 - в регистр D11, реле M20 и М21 сбрасываются (рисунок 8).
Рисунок 8 - Сброс флагов М20 и М21 при успешной записи
5.5 Работа с битовыми значениями
Так как данные состояния дискретных входов и дискретного выхода считываются целым регистром, необходимо из считанного значения выделить нужные биты. Сделать это можно с помощью инструкции BLD - установка состояния нормально открытого контакта по заданному биту. Инструкция имеет следующий формат записи:
BLD
Адрес регистра
Номер бита
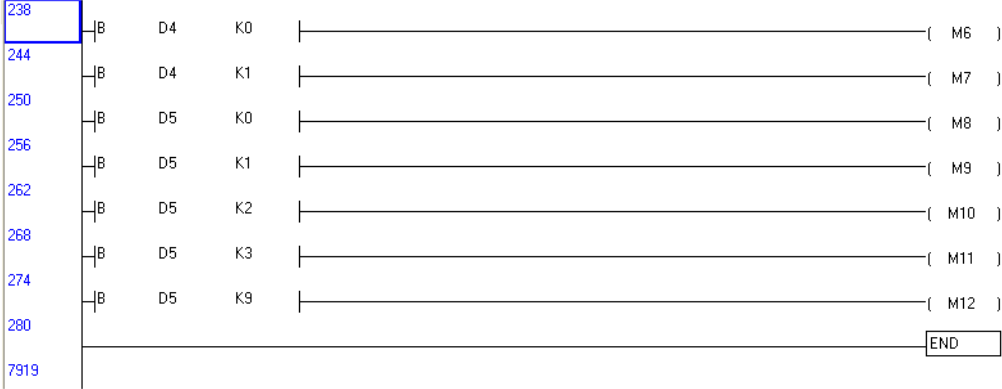
На рисунке 9 приведен фрагмент программы, где в регистрах D4 и D5 проверяется состояние определенных битов и затем их значения присваиваются внутренним реле М6-М12.
Рисунок 9 - Обработка битовых значений
Например, в регистре D5 находятся данные, считанные из регистра 0016h преобразователя частоты. Значение K0 означает, что проверяется состояние входа FWD.
0 - Прямое направления вращения 1 - Обратное направление вращения
М7
0 - ПЧ в режиме Стоп 1 - ПЧ в режиме Пуск
М8
Состояние входа FWD
М9
Состояние входа REV
М10
Состояние входа S1
M11
Состояние входа S2
M12
Состояние дискретного выхода
5.6. Практический пример
Нередко встречаются задачи, в которых необходимо осуществлять пуск на фиксированной частоте и остановку трехфазного асинхронного электродвигателя с программируемого логического контроллера, а также иметь возможность осуществлять локальное управление с кнопки. Для решения данной задачи следует произвести подключение кнопок, как показано на рисунке 10.
Рисунок 10 - Схема подключения
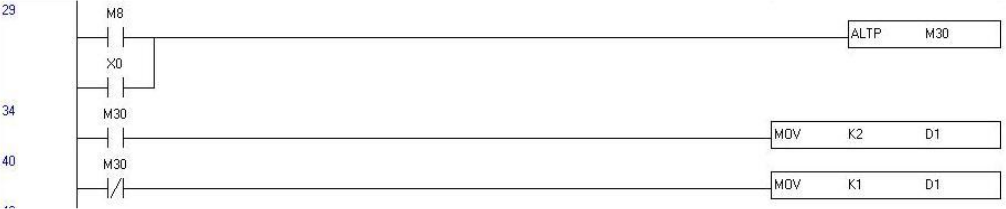
Также необходимо добавить в начало программы несколько инструкций (рисунок 11).
Рисунок 11 - Пример работы с кнопками
Внутреннее реле М8 - дискретный вход FWD преобразователя частоты, состояние которого считывает ПЛК по интерфейсу RS-485. К нему подключена кнопка c нормально открытым контактом без фиксации.
Х0 - вход ПЛК DVP14SS211R к которому подключена такая же кнопка. Инструкция ALTP инвертирует состояние внутреннего реле М30 каждый раз, когда включается М8 или X0. В результате, при нажатии на любую из кнопок произойдет запуск электродвигателя на частоте 30 Гц, при повторном нажатии – остановка.
В данной статье будет рассмотрено подключение преобразователя сигналов тензодатчиков ELHART EWM-D2-RS к ПЛК LogicOn по интерфейсу RS-485, настройка связи по интерфейсу RS-485 и протоколу Modbus RTU, приведен пример управляющей программы для контроллера
Насосы являются одной из наиболее распространенных технологических машин в различных отраслях промышленности. При этом, в некоторых применениях возникают задачи, связанные с необходимостью чередования насосов по времени.
31.07.2020
Отправка сообщения об ошибке
Отправка сообщения об ошибке
Используя этот веб-сайт, Вы даете согласие на обработку файлов cookie, пользовательских данных в целях корректного функционирования сайта и проведения статических исследований.